深圳慧德诺科技有限公司

深圳慧德诺科技有限公司
食品包装专用蜘蛛手并联机器人具有高度灵活性和适应性,可以适应各种复杂的环境和生产任务。其次,蜘蛛手并联机器人的控制系统,可以有效地避免故障和错误。这些特点使得蜘蛛手并联机器人成为生产线上的理想选择,可以完成装配、搬运、检测等环节的任务。
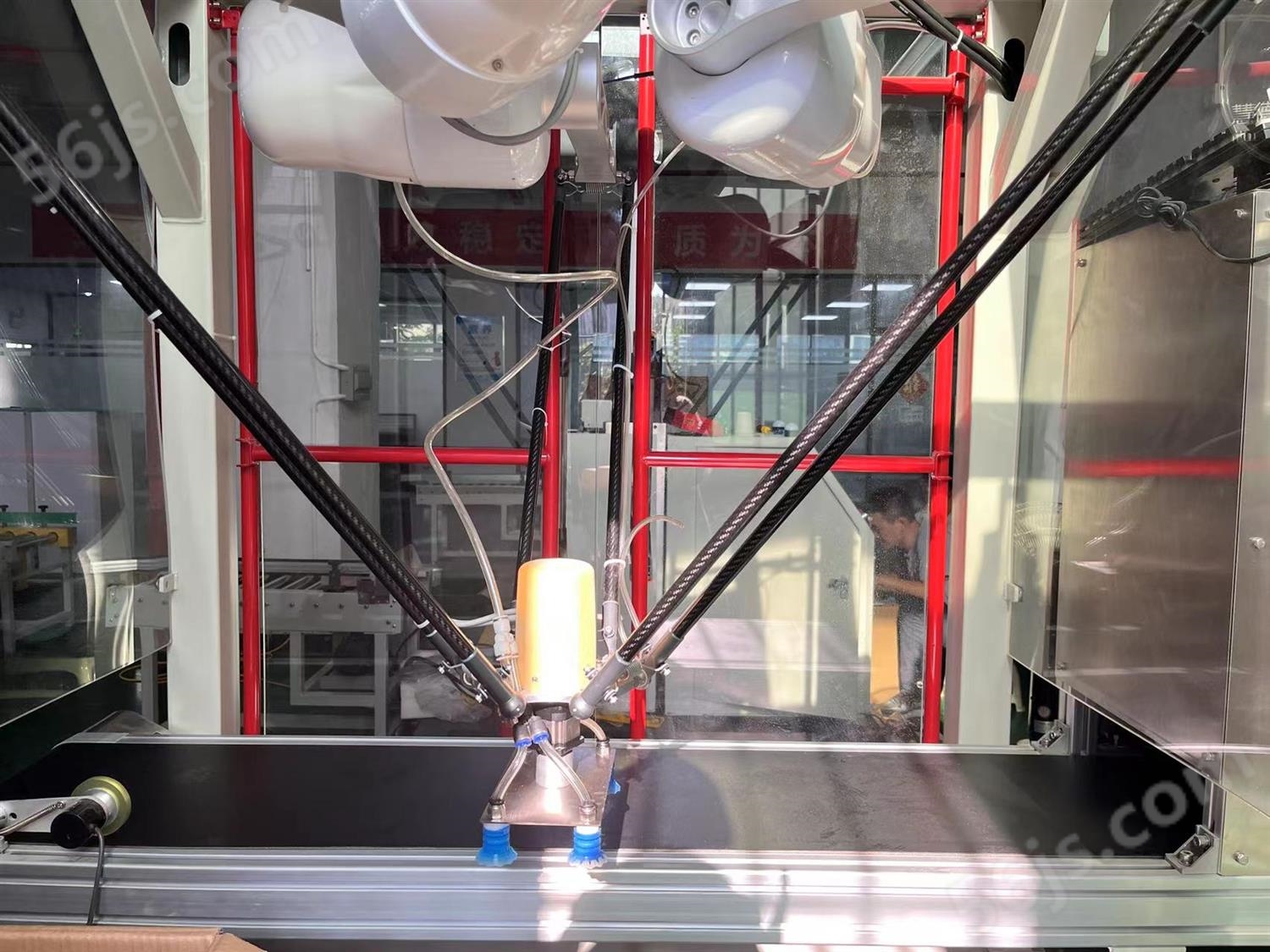
蜘蛛手并联机器人是一种具有3个空间自由度和1个转动自由度的并联机器人,通过示数编程或视觉系统捕捉目标物体,由三个并联的伺服轴确定抓具中心(TCP)的空间位置,实现目标物体的快速拾取、分拣、装箱、搬运、加工等操作
蜘蛛手并联机器人已经被广泛应用于自动化装箱流程,根据预定的装箱流程,在电控系统的控制下自动将所要装箱的物体搬运到托盘上进行装箱。此外,蜘蛛手并联机器人还具有集成智能视觉识别功能,具有良好的动态跟踪功能,可以实现快速分拣。
1.它占地面积小,结构简单,适应各式工作环境,故障率低,易维修保养。
2. 高效性:蜘蛛手并联机器人具有快速拾取、分拣、装箱、搬运、加工等操作的能力,可以大大提高食品生产的效率。
3.具有良好的动态跟踪功能,可以实现快速分拣,大大提高了分拣的准确性和速度
4.集成智能视觉识别功能:可以自动识别并抓取目标物体,大大提高了工作的灵活性和效率 。
首先,机器人通过集成智能视觉系统识别并抓取目标物体。这一步可以通过预设的程序或手动操作完成。然后,机器人通过三个并联的伺服轴确定抓具中心(TCP)的空间位置。这个过程是根据目标物体的空间坐标和姿态,通过计算得出机器人TCP的位置和姿态。接下来,机器人根据预设的路径或通过视觉系统识别目标物体的位置和姿态,规划出一条从起始点到目标点的路径 。机器人根据规划的路径,通过伺服系统的控制,实现平稳、快速的移动。最后,机器人通过抓具中心(TCP)抓取目标物体,完成拾取、分拣、装箱、搬运、加工等操作。
适应于化工、饮料、食品、啤酒、塑料、空调等生产企业对纸箱、袋装、罐装、盒装、瓶装等各种形状的成品进行装箱、分拣、搬运。

您感兴趣的产品PRODUCTS YOU ARE INTERESTED IN

物流技术网 设计制作,未经允许翻录必究 .
请输入账号
请输入密码
请输验证码