




 直播回放
直播回放
 直播回放
直播回放

MIT开发能“感知”隐藏物体的机器人
2021-05-12 08:51:03cnBeta阅读量:19032 我要评论
导读:麻省理工学院的研究人员开发了一种机器人,它将视觉与射频(RF)传感结合起来,以寻找和抓取物体,即使它们被隐藏在视野之外。这项技术可以帮助电子商务仓库任务的执行。
【物流设备网 新品动态】麻省理工学院的研究人员开发了一种机器人,它将视觉与射频(RF)传感结合起来,以寻找和抓取物体,即使它们被隐藏在视野之外。这项技术可以帮助电子商务仓库任务的执行。
近年来,机器人已经获得了人工视觉、触觉,甚至嗅觉。麻省理工学院副教授Fadel Adib说:“研究人员一直在赋予机器人类似人类的感知能力。在一篇新的论文中,Adib的团队正在进一步推动这项技术。”他说:“我们正试图赋予机器人超人的感知力。”
研究人员已经开发出一种机器人,它使用可以穿过墙壁的无线电波来感知被遮挡的物体。这种机器人被称为RF-Grasp,它将这种强大的感应与更传统的计算机视觉相结合,以定位和抓取可能被挡住的物品。这一进步有朝一日可以简化仓库中的电子商务执行工作,或者帮助机器从杂乱的工具包中取出一把螺丝刀。
这项研究将于5月在IEEE国际机器人和自动化会议上发表。该论文的主要作者是麻省理工学院媒体实验室信号动力学组的研究助理Tara Boroushaki。她在麻省理工学院的合著者包括Adib,他是信号动力学小组的主任;以及Alberto Rodriguez,机械工程系1957级副教授。其他共同作者包括哈佛大学的研究工程师冷俊山和乔治亚理工大学的博士生Ian Clester。
随着电子商务的不断发展,仓库工作通常仍然是人类的领域,而不是机器人,尽管有时工作条件很危险。这部分是因为机器人在如此拥挤的环境中难以定位和抓取物体。Rodriguez说:“感知和拣选是当今行业的两个拦路虎。仅仅使用光学视觉,机器人无法感知到被装在箱子里或藏在货架上另一个物体后面的物品的存在--当然,可见光波不能穿过墙壁。”
几十年来,无线电频率(RF)识别已经被用来追踪从图书馆书籍到宠物的一切。射频识别系统有两个主要组成部分:一个阅读器和一个标签。标签是一个微小的计算机芯片,附着在要追踪的物品上--或者,在宠物的情况下,植入其中。然后,阅读器发出一个射频信号,该信号被标签调制并反射到阅读器。
反射的信号提供了关于标签物品的位置和身份的信息。这项技术已经在零售供应链中得到了普及--日本的目标是在几年内对几乎所有的零售采购都使用射频追踪。研究人员意识到这种大量的射频可能是机器人的福音,给它们带来另一种感知模式。
Rodriguez说:“射频是一种与视觉不同的感应方式。如果不探索射频能做什么,那将是一个错误。”
RF-Grasp同时使用一个摄像头和一个射频读取器来寻找和抓取被标记的物体,即使它们完全被挡在摄像头的视野之外。它由一个连接到抓取手的机器人手臂组成。摄像头位于机器人的手腕上。射频阅读器独立于机器人,并将跟踪信息传递给机器人的控制算法。因此,机器人不断地收集射频跟踪数据和其周围环境的视觉图片。将这两个数据流整合到机器人的决策中是研究人员面临的最大挑战之一。
Boroushaki说:“机器人必须决定,在每个时间点上,这些数据流中哪一个更重要,需要考虑。这不仅仅是眼-手协调,它是射频-眼-手协调。因此,问题变得非常复杂。”
机器人通过呼唤目标物体的射频标签来感知它的位置,从而启动了寻觅和抓取的过程。"它首先使用射频来集中视觉的注意力,"Adib说。"然后你用视觉来引导精细的操作。"这个顺序类似于听到来自背后的警报声,然后转身去看,更清楚地了解警报声的来源。
凭借其两种互补的感官,射频抓取器将目标对象锁定。当它越来越近,甚至开始操纵该物品时,提供比射频更精细细节的视觉在机器人的决策中占主导地位。
RF-Grasp在一系列的测试中证明了其效率。与一个只配备了摄像头的类似机器人相比,RF-Grasp能够准确定位并抓住目标物体,而其总运动量约为一半。此外,RF-Grasp显示了"清除"其环境的独特能力--清除包装材料和其他挡路的障碍物,以便接近目标。Rodriguez表示,这表明RF-Grasp与没有穿透性RF感应的机器人相比具有"不公平的优势"。"它拥有其他系统根本不具备的这种指导。"
RF-Grasp有一天可以在拥挤的电子商务仓库中进行履行。它的射频传感甚至可以立即验证一个物品的身份,而不需要操作该物品,暴露其条形码,然后扫描它。Rodriguez说:“射频有可能改善工业中的一些限制,特别是在感知和定位方面。”
Adib还设想了机器人的潜在家庭应用,比如找到正确的扳手来组装你的宜家椅子。“或者你可以想象这个机器人寻找丢失的物品。它就像一个超级隆巴,去找回我的钥匙,无论我把它们放在哪里。”
原标题:MIT开发能“感知”隐藏物体的机器人:“我们正试图赋予机器人超人的感知力”
版权与免责声明:1.凡本网注明“来源:物流技术网”的所有作品,均为浙江兴旺宝明通网络有限公司-兴旺宝合法拥有版权或有权使用的作品,未经本网授权不得转载、摘编或利用其它方式使用上述作品。已经本网授权使用作品的,应在授权范围内使用,并注明“来源:物流技术网”。违反上述声明者,本网将追究其相关法律责任。 2.本网转载并注明自其它来源(非物流技术网)的作品,目的在于传递更多信息,并不代表本网赞同其观点或和对其真实性负责,不承担此类作品侵权行为的直接责任及连带责任。其他媒体、网站或个人从本网转载时,必须保留本网注明的作品第一来源,并自负版权等法律责任。 3.如涉及作品内容、版权等问题,请在作品发表之日起一周内与本网联系,否则视为放弃相关权利。
相关新闻
-
 4月18-20日,2024第十二届江门先进制造业博览会以“先进制造,引领未来”为主题,将在广东珠西国际会展中心(江门市蓬江区)举办。
4月18-20日,2024第十二届江门先进制造业博览会以“先进制造,引领未来”为主题,将在广东珠西国际会展中心(江门市蓬江区)举办。- 2024-03-22 09:33:15
- 73
-

国家邮政局党组召开会议强调,深化行业科技创新成果应用 培育发展新质生产力新动能
2月6日,国家邮政局党组召开会议,学习贯彻1月31日中央政治局会议精神和习近平总书记重要讲话精神。- 2024-02-22 11:50:32
- 64
-
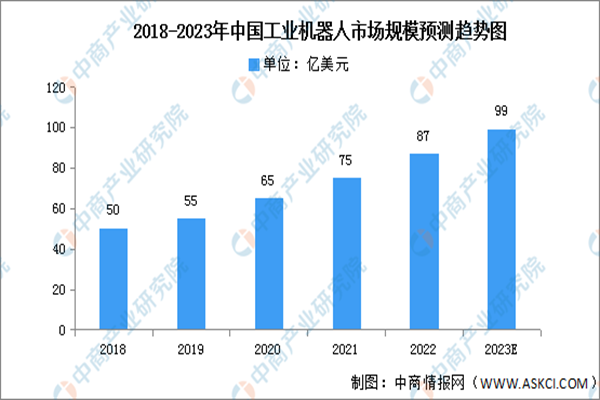 工业机器人市场,不断向供应商释放红利!抢占西部市场,欢迎“出战”第24届立嘉国际工业自动化与机器人展览会!
工业机器人市场,不断向供应商释放红利!抢占西部市场,欢迎“出战”第24届立嘉国际工业自动化与机器人展览会!- 2024-02-19 15:46:19
- 95


















昵称 验证码 请输入正确验证码
所有评论仅代表网友意见,与本站立场无关